QUESTION IMAGE
Question
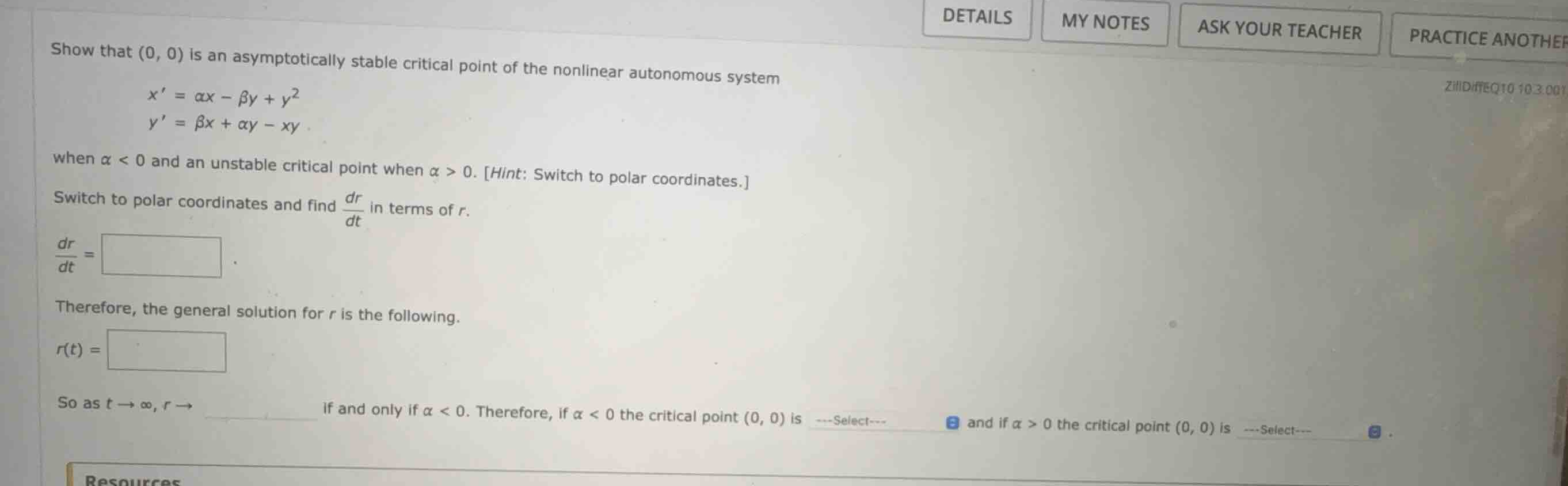
show that \\((0, 0)\\) is an asymptotically stable critical point of the nonlinear autonomous system
\\
\
\\
when \\(\alpha < 0\\) and an unstable critical point when \\(\alpha > 0\\). hint: switch to polar coordinates.
switch to polar coordinates and find \\(\frac{dr}{dt}\\) in terms of \\(r\\).
\\(\frac{dr}{dt} = \\)
therefore, the general solution for \\(r\\) is the following.
\\(r(t) = \\)
so as \\(t \to \infty\\), \\(r \to \\) if and only if \\(\alpha < 0\\). therefore, if \\(\alpha < 0\\) the critical point \\((0, 0)\\) is select and if \\(\alpha > 0\\) the critical point \\((0, 0)\\) is select.
<pre_analysis>
{
"quality": "clear",
"question_count": 1,
"skills_matched": [
"step_cot",
"explain_then_answer",
"tutor"
],
"needs_drawing": false,
"concepts_used": [
"Nonlinear Systems of ODEs",
"Stability of Critical Points"
],
"new_concepts": [
"Polar Coordinates for ODEs"
],
"current_concepts": [
"Nonlinear Systems of ODEs",
"Stability of Critical Points",
"Polar Coordinates for ODEs"
]
}
</pre_analysis>
<reasoning>
Convert the system to polar coordinates
We use the standard polar coordinate transformations:
\[
x = r \cos\theta, \quad y = r \sin\theta
\]
Differentiating \(r^2 = x^2 + y^2\) with respect to \(t\) gives:
\[
2r \frac{dr}{dt} = 2x \frac{dx}{dt} + 2y \frac{dy}{dt} \implies r \frac{dr}{dt} = x x' + y y'
\]
Substitute the given system equations \(x' = \alpha x - \beta y + y^2\) and \(y' = \beta x + \alpha y - xy\):
\[
\]
Dividing both sides by \(r\) (for \(r > 0\)) yields:
\[
\frac{dr}{dt} = \alpha r
\]
This step applies the concept of Nonlinear Systems of ODEs to simplify the system.
Solve the differential equation for \(r\)
Using the Stability of Critical Points analysis, we solve the separable first-order linear differential equation:
\[
\frac{dr}{dt} = \alpha r
\]
Separating variables and integrating:
\[
\int \frac{1}{r} \, dr = \int \alpha \, dt \implies \ln(r) = \alpha t + C
\]
Exponentiating both sides gives the general solution:
\[
r(t) = r_0 e^{\alpha t}
\]
where \(r_0 = r(0)\) is the initial radius.
Analyze asymptotic behavior as \(t \to \infty\)
We examine the limit of \(r(t)\) as \(t \to \infty\):
\[
\lim_{t \to \infty} r(t) = \lim_{t \to \infty} r_0 e^{\alpha t}
\]
- If \(\alpha < 0\), the exponent is negative, so \(e^{\alpha t} \to 0\). Thus, \(r \to 0\).
- If \(\alpha > 0\), the exponent is positive, so \(e^{\alpha t} \to \infty\). Thus, \(r \to \infty\).
Therefore, \(r \to 0\) as \(t \to \infty\) if and only if \(\alpha < 0\).
Determine stability of the critical point
- When \(\alpha < 0\), any trajectory starting near the origin satisfies \(r(t) \to 0\) as \(t \to \infty\), meaning the trajectories converge to the origin. Thus, the critical point \((0, 0)\) is asymptotically stable.
- When \(\alpha > 0\), trajectories starting near the origin satisfy \(r(t) \to \infty\) as \(t \to \infty\), meaning they move away from the origin. Thus, the critical point \((0, 0)\) is unstable.
</reasoning>
<answer>
The differential equation for \(r\) in terms of \(r\) is:
\[
\frac{dr}{dt} = \alpha r
\]
The general solution for \(r(t)\) is:
\[
r(t) = r_0 e^{\alpha t}
\]
As \(t \to \infty\), \(r \to 0\) if and only if \(\alpha < 0\).
Therefore, if \(\alpha < 0\) the critical point \((0, 0)\) is asymptotically stable, and if \(\alpha > 0\) the critical point \((0, 0)\) is unstable.
</answer>
<post_analysis>
{
"subject": "Mathematics",
"question_type": "Fill-in-the-blank",
"knowledge_point": [
"Mathematics",
"Calculus",
"Stability of Critical Points"
]
}
</post_analysis>

Snap & solve any problem in the app
Get step-by-step solutions on Sovi AI
Photo-based solutions with guided steps
Explore more problems and detailed explanations
<pre_analysis>
{
"quality": "clear",
"question_count": 1,
"skills_matched": [
"step_cot",
"explain_then_answer",
"tutor"
],
"needs_drawing": false,
"concepts_used": [
"Nonlinear Systems of ODEs",
"Stability of Critical Points"
],
"new_concepts": [
"Polar Coordinates for ODEs"
],
"current_concepts": [
"Nonlinear Systems of ODEs",
"Stability of Critical Points",
"Polar Coordinates for ODEs"
]
}
</pre_analysis>
<reasoning>
Convert the system to polar coordinates
We use the standard polar coordinate transformations:
\[
x = r \cos\theta, \quad y = r \sin\theta
\]
Differentiating \(r^2 = x^2 + y^2\) with respect to \(t\) gives:
\[
2r \frac{dr}{dt} = 2x \frac{dx}{dt} + 2y \frac{dy}{dt} \implies r \frac{dr}{dt} = x x' + y y'
\]
Substitute the given system equations \(x' = \alpha x - \beta y + y^2\) and \(y' = \beta x + \alpha y - xy\):
\[
\]
Dividing both sides by \(r\) (for \(r > 0\)) yields:
\[
\frac{dr}{dt} = \alpha r
\]
This step applies the concept of Nonlinear Systems of ODEs to simplify the system.
Solve the differential equation for \(r\)
Using the Stability of Critical Points analysis, we solve the separable first-order linear differential equation:
\[
\frac{dr}{dt} = \alpha r
\]
Separating variables and integrating:
\[
\int \frac{1}{r} \, dr = \int \alpha \, dt \implies \ln(r) = \alpha t + C
\]
Exponentiating both sides gives the general solution:
\[
r(t) = r_0 e^{\alpha t}
\]
where \(r_0 = r(0)\) is the initial radius.
Analyze asymptotic behavior as \(t \to \infty\)
We examine the limit of \(r(t)\) as \(t \to \infty\):
\[
\lim_{t \to \infty} r(t) = \lim_{t \to \infty} r_0 e^{\alpha t}
\]
- If \(\alpha < 0\), the exponent is negative, so \(e^{\alpha t} \to 0\). Thus, \(r \to 0\).
- If \(\alpha > 0\), the exponent is positive, so \(e^{\alpha t} \to \infty\). Thus, \(r \to \infty\).
Therefore, \(r \to 0\) as \(t \to \infty\) if and only if \(\alpha < 0\).
Determine stability of the critical point
- When \(\alpha < 0\), any trajectory starting near the origin satisfies \(r(t) \to 0\) as \(t \to \infty\), meaning the trajectories converge to the origin. Thus, the critical point \((0, 0)\) is asymptotically stable.
- When \(\alpha > 0\), trajectories starting near the origin satisfy \(r(t) \to \infty\) as \(t \to \infty\), meaning they move away from the origin. Thus, the critical point \((0, 0)\) is unstable.
</reasoning>
<answer>
The differential equation for \(r\) in terms of \(r\) is:
\[
\frac{dr}{dt} = \alpha r
\]
The general solution for \(r(t)\) is:
\[
r(t) = r_0 e^{\alpha t}
\]
As \(t \to \infty\), \(r \to 0\) if and only if \(\alpha < 0\).
Therefore, if \(\alpha < 0\) the critical point \((0, 0)\) is asymptotically stable, and if \(\alpha > 0\) the critical point \((0, 0)\) is unstable.
</answer>
<post_analysis>
{
"subject": "Mathematics",
"question_type": "Fill-in-the-blank",
"knowledge_point": [
"Mathematics",
"Calculus",
"Stability of Critical Points"
]
}
</post_analysis>